- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

बैटरी मीटर का परिचय
बैटरी मीटर का परिचय
1.1 बिजली मीटर के कार्यों का परिचय
बैटरी प्रबंधन को बिजली प्रबंधन का हिस्सा माना जा सकता है। बैटरी प्रबंधन में, बिजली मीटर बैटरी की क्षमता का अनुमान लगाने के लिए जिम्मेदार है। इसका मूल कार्य वोल्टेज, चार्जिंग/डिस्चार्जिंग करंट और बैटरी तापमान की निगरानी करना और बैटरी की चार्ज स्थिति (एसओसी) और पूर्ण चार्ज क्षमता (एफसीसी) का अनुमान लगाना है। बैटरी के चार्ज की स्थिति का अनुमान लगाने के लिए दो विशिष्ट तरीके हैं: ओपन सर्किट वोल्टेज विधि (ओसीवी) और कूलम्बिक माप विधि। एक अन्य विधि RICHTEK द्वारा डिज़ाइन किया गया डायनेमिक वोल्टेज एल्गोरिदम है।
1.2 ओपन सर्किट वोल्टेज विधि
बिजली मीटर के लिए ओपन सर्किट वोल्टेज विधि का उपयोग करने की कार्यान्वयन विधि अपेक्षाकृत आसान है, और इसे ओपन सर्किट वोल्टेज के चार्ज की संबंधित स्थिति की जांच करके प्राप्त किया जा सकता है। ओपन सर्किट वोल्टेज के लिए अनुमानित स्थिति बैटरी टर्मिनल वोल्टेज है जब बैटरी लगभग 30 मिनट तक आराम कर रही होती है।
बैटरी का वोल्टेज वक्र बैटरी के भार, तापमान और उम्र बढ़ने के आधार पर भिन्न होता है। इसलिए, एक निश्चित ओपन सर्किट वोल्टमीटर पूरी तरह से चार्ज की स्थिति का प्रतिनिधित्व नहीं कर सकता है; केवल तालिकाओं को देखकर चार्ज की स्थिति का अनुमान लगाना संभव नहीं है। दूसरे शब्दों में, यदि आवेश की स्थिति का अनुमान केवल तालिका को देखकर लगाया जाता है, तो त्रुटि महत्वपूर्ण होगी।
निम्नलिखित चित्र से पता चलता है कि समान बैटरी वोल्टेज के तहत, ओपन सर्किट वोल्टेज विधि के माध्यम से प्राप्त चार्ज की स्थिति में महत्वपूर्ण अंतर होता है।
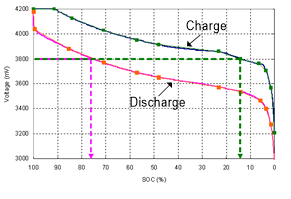
चित्र 5. चार्जिंग और डिस्चार्जिंग स्थितियों के तहत बैटरी वोल्टेज
जैसा कि नीचे दिए गए चित्र में दिखाया गया है, डिस्चार्ज के दौरान विभिन्न भारों के तहत चार्ज की स्थिति में भी महत्वपूर्ण अंतर होता है। तो मूल रूप से, ओपन सर्किट वोल्टेज विधि केवल चार्ज की स्थिति के लिए कम सटीकता आवश्यकताओं वाले सिस्टम के लिए उपयुक्त है, जैसे लेड-एसिड बैटरी या निर्बाध बिजली आपूर्ति का उपयोग करने वाली कारें।
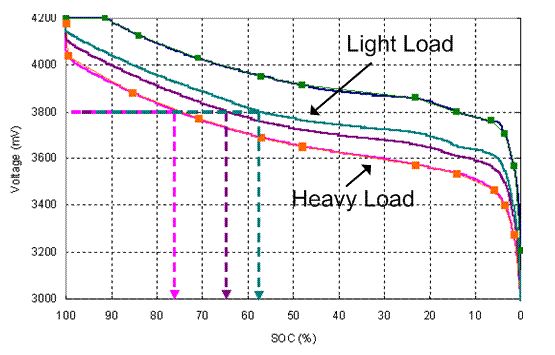
चित्र 2. डिस्चार्ज के दौरान विभिन्न भारों के तहत बैटरी वोल्टेज
1.3 कूलम्बिक मेट्रोलॉजी
कूलम्ब मेट्रोलॉजी का संचालन सिद्धांत बैटरी के चार्जिंग/डिस्चार्जिंग पथ पर एक डिटेक्शन रेसिस्टर को जोड़ना है। एडीसी डिटेक्शन रेसिस्टर पर वोल्टेज को मापता है और इसे चार्ज या डिस्चार्ज होने वाली बैटरी के वर्तमान मूल्य में परिवर्तित करता है। वास्तविक समय काउंटर (आरटीसी) यह निर्धारित करने के लिए समय के साथ वर्तमान मूल्य का एकीकरण प्रदान करता है कि कितने कूलम्ब बह रहे हैं।

चित्र 3. कूलम्ब माप पद्धति का मूल कार्य मोड
कूलम्बिक मेट्रोलॉजी चार्जिंग या डिस्चार्जिंग प्रक्रिया के दौरान चार्ज की वास्तविक समय स्थिति की सटीक गणना कर सकती है। चार्जिंग कूलम्ब काउंटर और डिस्चार्जिंग कूलम्ब काउंटर का उपयोग करके, यह शेष विद्युत क्षमता (आरएम) और पूर्ण चार्जिंग क्षमता (एफसीसी) की गणना कर सकता है। साथ ही, शेष चार्ज क्षमता (आरएम) और पूरी तरह चार्ज क्षमता (एफसीसी) का उपयोग चार्ज की स्थिति की गणना के लिए भी किया जा सकता है, यानी (एसओसी = आरएम/एफसीसी)। इसके अलावा, यह शेष समय, जैसे बिजली की कमी (टीटीई) और बिजली रिचार्ज (टीटीएफ) का भी अनुमान लगा सकता है।
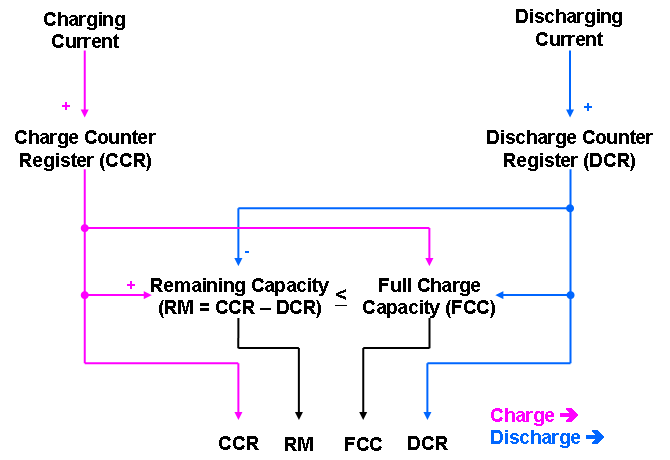
चित्र 4. कूलम्ब मेट्रोलॉजी के लिए गणना सूत्र
दो मुख्य कारक हैं जो कूलम्ब मेट्रोलॉजी की सटीकता विचलन का कारण बनते हैं। पहला वर्तमान संवेदन और एडीसी माप में ऑफसेट त्रुटियों का संचय है। हालाँकि वर्तमान तकनीक में माप त्रुटि अपेक्षाकृत छोटी है, लेकिन इसे खत्म करने की अच्छी विधि के बिना, यह त्रुटि समय के साथ बढ़ती जाएगी। निम्नलिखित आंकड़े से पता चलता है कि व्यावहारिक अनुप्रयोगों में, यदि समय की अवधि में कोई सुधार नहीं होता है, तो संचित त्रुटि असीमित है।
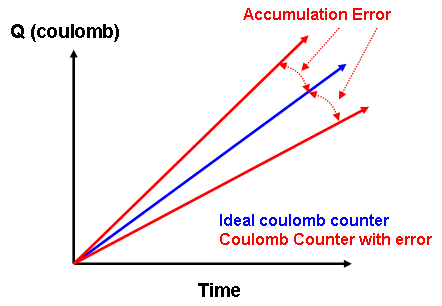
चित्र 5. कूलम्ब माप पद्धति की संचित त्रुटि
संचयी त्रुटियों को खत्म करने के लिए, तीन संभावित समय बिंदु हैं जिनका उपयोग सामान्य बैटरी ऑपरेशन के दौरान किया जा सकता है: चार्ज का अंत (ईओसी), डिस्चार्ज का अंत (ईओडी), और आराम (आराम)। जब चार्जिंग समाप्ति की स्थिति पूरी हो जाती है, तो यह इंगित करता है कि बैटरी पूरी तरह से चार्ज है और चार्ज की स्थिति (एसओसी) 100% होनी चाहिए। डिस्चार्ज समाप्ति की स्थिति इंगित करती है कि बैटरी पूरी तरह से डिस्चार्ज हो गई है और चार्ज की स्थिति (एसओसी) 0% होनी चाहिए; यह एक पूर्ण वोल्टेज मान हो सकता है या यह लोड के साथ भिन्न हो सकता है। आराम की स्थिति में पहुंचने पर, बैटरी न तो चार्ज होती है और न ही डिस्चार्ज होती है, और यह लंबे समय तक इसी स्थिति में रहती है। यदि उपयोगकर्ता कूलोमेट्रिक विधि की त्रुटि को ठीक करने के लिए बैटरी रेस्ट स्थिति का उपयोग करना चाहता है, तो इस समय एक ओपन सर्किट वोल्टमीटर का उपयोग किया जाना चाहिए। निम्नलिखित आंकड़े से पता चलता है कि उपरोक्त राज्यों में चार्ज त्रुटि की स्थिति को ठीक किया जा सकता है।
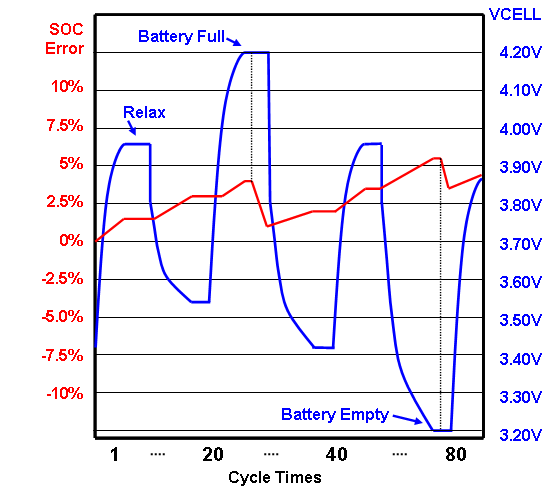
चित्र 6. कूलम्बिक मेट्रोलॉजी में संचित त्रुटियों को दूर करने की शर्तें
कूलम्ब मेट्रोलॉजी की सटीकता विचलन का दूसरा मुख्य कारक पूर्ण चार्ज क्षमता (एफसीसी) त्रुटि है, जो बैटरी की डिज़ाइन की गई क्षमता और बैटरी की वास्तविक पूर्ण चार्ज क्षमता के बीच का अंतर है। पूरी तरह चार्ज क्षमता (एफसीसी) तापमान, उम्र बढ़ने और भार जैसे कारकों से प्रभावित होती है। इसलिए, कूलम्बिक मेट्रोलॉजी के लिए पूरी तरह चार्ज क्षमता के लिए पुनः सीखना और क्षतिपूर्ति के तरीके महत्वपूर्ण हैं। निम्नलिखित आंकड़ा चार्ज त्रुटि की स्थिति की प्रवृत्ति घटना को दर्शाता है जब पूरी तरह से चार्ज की गई क्षमता को अधिक और कम करके आंका जाता है।
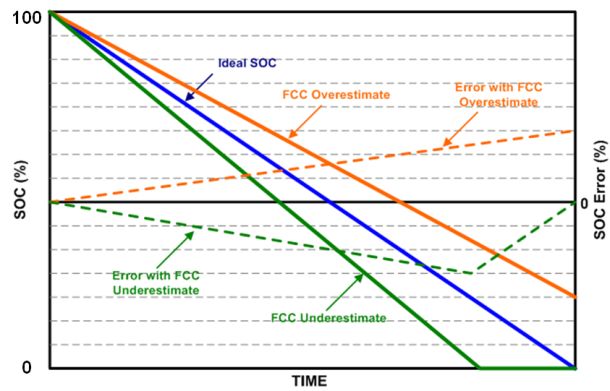
चित्र 7: जब पूरी तरह से चार्ज की गई क्षमता को अधिक या कम करके आंका जाता है तो त्रुटि की प्रवृत्ति
1.4 गतिशील वोल्टेज एल्गोरिदम बिजली मीटर
डायनेमिक वोल्टेज एल्गोरिदम पूरी तरह से बैटरी वोल्टेज के आधार पर लिथियम बैटरी के चार्ज की स्थिति की गणना कर सकता है। यह विधि बैटरी वोल्टेज और बैटरी के ओपन सर्किट वोल्टेज के बीच अंतर के आधार पर चार्ज की स्थिति में वृद्धि या कमी का अनुमान लगाती है। गतिशील वोल्टेज जानकारी प्रभावी ढंग से लिथियम बैटरी के व्यवहार का अनुकरण कर सकती है और चार्ज की स्थिति (एसओसी) (%) निर्धारित कर सकती है, लेकिन यह विधि बैटरी क्षमता मूल्य (एमएएच) का अनुमान नहीं लगा सकती है।
इसकी गणना पद्धति बैटरी वोल्टेज और ओपन सर्किट वोल्टेज के बीच गतिशील अंतर पर आधारित है, और चार्ज की स्थिति में प्रत्येक वृद्धि या कमी की गणना करने के लिए पुनरावृत्त एल्गोरिदम का उपयोग करके चार्ज की स्थिति का अनुमान लगाती है। कूलम्ब विधि बिजली मीटर के समाधान की तुलना में, गतिशील वोल्टेज एल्गोरिदम बिजली मीटर समय और वर्तमान के साथ त्रुटियां जमा नहीं करते हैं। करंट सेंसिंग त्रुटियों और बैटरी सेल्फ डिस्चार्ज के कारण कूलम्बिक मीटरिंग मीटर में अक्सर चार्ज की स्थिति का गलत अनुमान होता है। भले ही वर्तमान सेंसिंग त्रुटि बहुत छोटी हो, कूलम्ब काउंटर त्रुटियों को जमा करना जारी रखेगा, जिसे केवल पूर्ण चार्जिंग या डिस्चार्जिंग के बाद ही समाप्त किया जा सकता है।
गतिशील वोल्टेज एल्गोरिदम का उपयोग केवल वोल्टेज जानकारी के आधार पर बैटरी के चार्ज की स्थिति का अनुमान लगाने के लिए किया जाता है; चूँकि बैटरी की वर्तमान जानकारी के आधार पर इसका अनुमान नहीं लगाया जाता है, इसलिए त्रुटियों का कोई संचय नहीं होता है। चार्ज की स्थिति की सटीकता में सुधार करने के लिए, गतिशील वोल्टेज एल्गोरिदम को पूरी तरह से चार्ज और पूरी तरह से डिस्चार्ज स्थितियों के तहत वास्तविक बैटरी वोल्टेज वक्र के आधार पर अनुकूलित एल्गोरिदम के पैरामीटर को समायोजित करने के लिए एक वास्तविक डिवाइस का उपयोग करने की आवश्यकता होती है।
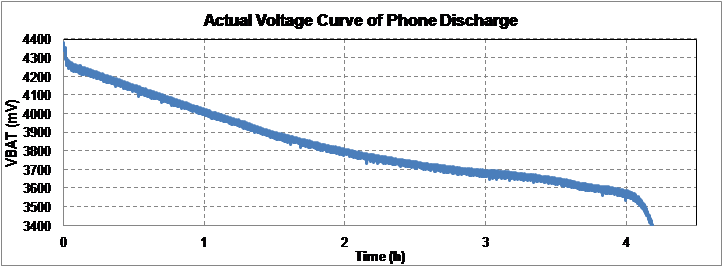

चित्र 8. बिजली मीटर और लाभ अनुकूलन के लिए गतिशील वोल्टेज एल्गोरिदम का प्रदर्शन
चार्ज की स्थिति के संदर्भ में विभिन्न डिस्चार्ज दर स्थितियों के तहत गतिशील वोल्टेज एल्गोरिदम का प्रदर्शन निम्नलिखित है। जैसा कि चित्र में दिखाया गया है, इसकी चार्ज स्थिति की सटीकता अच्छी है। C/2, C/4, C/7, और C/10 की डिस्चार्ज स्थितियों के बावजूद, इस विधि की चार्ज त्रुटि की समग्र स्थिति 3% से कम है।

चित्र 9. विभिन्न डिस्चार्ज दर स्थितियों के तहत गतिशील वोल्टेज एल्गोरिदम के चार्ज की स्थिति का प्रदर्शन
निम्नलिखित चित्र शॉर्ट चार्जिंग और शॉर्ट डिस्चार्जिंग स्थितियों के तहत बैटरी के चार्ज की स्थिति को दर्शाता है। आवेश की स्थिति की त्रुटि अभी भी बहुत छोटी है, और अधिकतम त्रुटि केवल 3% है।

चित्र 10. बैटरियों के शॉर्ट चार्ज और शॉर्ट डिस्चार्ज के मामले में डायनेमिक वोल्टेज एल्गोरिदम के चार्ज की स्थिति का प्रदर्शन
कूलम्ब मीटरिंग विधि की तुलना में, जिसके परिणामस्वरूप आमतौर पर करंट सेंसिंग त्रुटियों और बैटरी सेल्फ डिस्चार्ज के कारण चार्ज की गलत स्थिति होती है, डायनेमिक वोल्टेज एल्गोरिदम समय और करंट के साथ त्रुटियों को जमा नहीं करता है, जो एक बड़ा फायदा है। चार्जिंग/डिस्चार्जिंग धाराओं पर जानकारी की कमी के कारण, गतिशील वोल्टेज एल्गोरिदम में खराब अल्पकालिक सटीकता और धीमी प्रतिक्रिया समय होता है। इसके अलावा, यह पूरी चार्जिंग क्षमता का अनुमान नहीं लगा सकता। हालाँकि, यह दीर्घकालिक सटीकता के मामले में अच्छा प्रदर्शन करता है, क्योंकि बैटरी वोल्टेज अंततः सीधे इसकी चार्ज स्थिति को दर्शाता है।
जांच भेजें

X
हम आपको बेहतर ब्राउज़िंग अनुभव प्रदान करने, साइट ट्रैफ़िक का विश्लेषण करने और सामग्री को वैयक्तिकृत करने के लिए कुकीज़ का उपयोग करते हैं। इस साइट का उपयोग करके, आप कुकीज़ के हमारे उपयोग से सहमत हैं।
गोपनीयता नीति